Lithobraking, или Высота под уровнем моря
May. 26th, 2017 03:53 amОригинал взят у ![[livejournal.com profile]](https://www.dreamwidth.org/img/external/lj-userinfo.gif) fixik_papus в Lithobraking, или Высота под уровнем моря
fixik_papus в Lithobraking, или Высота под уровнем моря
Оно же на dreamwidth.
Оно же на dreamwidth.
Эпиграф.
- Как правильно тормозить двигателем?
- Сначала нужно тормозить бампером, затем радиатором и только после этого - двигателем.
(с) анекдот
На днях выложен официальный отчет о причинах жесткой посадки спускаемого аппарата "Скиапарелли" Европейского космического агентства на Марс.
Подобные отчеты хороши тем, что доступны публично - и дают редкую возможность заглянуть в поведение и причины отказов сложных систем автоматики.
И в большинстве случаев убедиться, из-за какой же ерунды оно не работает.
Фото отсюда. Все фото крупно по клику

Нельзя не отметить, что мягко приземлиться на Марсе (да и хотя бы просто долететь до Марса) - задача, мягко говоря, нетривиальная.
Исторически - примерно половина миссий вообще в район Марса не добралась.

инфографика отсюда
Итак, 16 октября 2016 года в 14:42:22 UTC спускаемый аппарат "Скиапарелли" (дальше - СА) вошел в марсианскую атмосферу.
Что было дальше - проще понять на картинке из вышеозначенного отчета.

Собственно, так оно все и сработало. За маленьким исключением:
Верхняя крышка вместе с парашютом отделилась намного раньше, чем нужно. А реактивный двигатель мягкой посадки был выключен через 3 секунды вместо расчетных 30. В результате "Скиапарелли" врубился в поверхность Марса на скорости примерно 150 метров в секунду.
Причины бОльшей части проваленных миссий к Марсу точно не установлены и поныне. Но в данном случае телеметрия со спускаемого аппарата была прямо в процессе спуска передана на спутник Trace Gas Orbiter - и оттуда в центр управления, что позволило произвести "разбор полетов".
Чтобы сложная цепочка событий выполнилась как нужно - СА должен знать, где он находится и далеко ли еще до земли (то бишь, до Марса).
Для этого на борту имеются инерциальная навигационная система (ИНС, суть гироскопы+акселерометры) и радарный высотомер.
ИНС рассчитана на определенный предел угловых скоростей. Если предел превышен - выдается сигнал "зашкал", данные соответственно недостоверны.
Чтобы нужный предел определить - провели некие расчеты по некой модели сверхзвукового парашюта и взяли предельный получившийся случай. На деле поведение парашюта оказалось несколько отличным от расчетного, а про неравномерное выгорание теплоизоляции вовсе забыли.
В результате ИНС первый раз ушла в "зашкал" еще при вводе парашюта. Проще говоря, СА как следует помотался на стропах, но затем стабилизировался.
Через небольшое время СА начал вращаться вокруг своей оси со скоростью, снова загнавшей ИНС в "зашкал".
Неправильно подобранные пределы измерения ИНС - это первая, но не последняя ошибка.
Когда при расследовании обратились к Jet Propulsion Laboratory - единственной в мире на сегодня конторе, умеющей сажать что-либо на Марс (и то не всегда) - ответ был прост и немного предсказуем:
"А чего вы хотели? Сверхзвуковой парашют в атмосфере Марса - штука плохо предсказуемая и на Земле толком не тестируемая, фиг смоделируешь. Посему рассчитывайте на все, что угодно, причем с запасом. Вон, у нас при посадке Opportunity та же фигня с закруткой была - и ничего, тринадцатый год по Марсу катается".
Надо было до старта спецов спрашивать, а не при разборе полетов, однако.
Кстати, мало кто знает, что обычный спускаемый на Землю аппарат корабля "Союз" при спуске так же закручивается со скоростью до 12 оборотов в минуту - и это считается штатным.
"Если предел превышен - выдается сигнал "зашкал", данные соответственно недостоверны"
Логика правильная, но вот уставка этого предела - оказалась неправильной. В результате некоторое время ИНС выдавала неправильные данные, не ставя флага переполнения.
В теории должно быть 15 мс. По факту все в эту цифру верили, но никто никогда не проверял.
(а будь там реально 15мс - при все при остальном посадка, вероятно, была бы мягкой).
Эти неправильные данные угловой скорости были успешно проинтегрированы бортовым компьютером при расчете угловых координат СА.
Результат интегрирования оказался настолько неправильным, что СА якобы "перевернут кверх ногами".
К сожалению, никому в голову не пришло подумать: а каким образом вообще аппарат, подвешенный под парашютом, может перевернуться кверх ногами и так лететь?
При дальнейшем расчете высоты (через угловые координаты = вектор направления движения и скорость) - рассчитанная высота оказалась отрицательной (косинус угла >90град отрицательный). То бишь - СА летит "где-то внутри Марса."
Никого из программистов не смутил ни сам факт отрицательной высоты летящего СА, ни мгновенное ее изменение на несколько километров.
Но не стОит считать программистов миссии "Экзомарс" совсем тупыми. Разумеется, там предусмотрена проверка: если ИНС выдает сигнал "зашкал" 5 секунд и дольше - он считается неисправным и управление передается радиовысотомеру (работавшему штатно).
Все замечательно. Но есть нюанс! Там не просто радиовысотомер, а допплеровский. Что означает: высотомер выдает не абсолютное значение высоты, а ее изменение.
Соответственно, чтобы работать по высотомеру - нужно знать "точку отсчета".
В качестве которой было взято... правильно, вышеупомянутое отрицательное значение высоты. Полученное о неисправной ИНС.
Которое теперь еще и уходило дальше "в минус" по мере реального снижения над Марсом!
Логика управления парашютом, получив информацию "СА находится под поверхностью Марса" - решила "парашют под землей не нужен" и отстрелила его нафих. И включила посадочный двигатель. (он, судя по логике, и под землей нужен).
Расчет времени отключения посадочного двигателя - это отдельный алгоритм. Выключение происходит, когда и кинетическая энергия летящего СА, и потенциальная энергия его в гравитационном поле Марса - равны нулю. Что есть совершенно корректное терминальное условие мягкой посадки.
Как его проверить? Сложили оба значения и проверили сумму на ноль.
Кинетическая энергия была посчитана правильно и была положительной. А вот потенциальная "под поверхностью Марса" оказалась настолько отрицательной, что условие отключения двигателя было выполнено еще до того, как он включился. В результате двигатель отключился так быстро, как только мог - через 3 секунды.
Отделение парашюта и отключение двигателя произошли в нескольких километрах над поверхностью Марса и на сверхзвуковой скорости.
Через несколько секунд высота СА - реально стала отрицательной!
Потому что от "торможения о поверхность" (lithobraking, ага) образовался кратер диаметром 2,4м и глубиной 0,5м.
Который нужно заслуженно назвать в честь главного программиста проекта.
(В отчете фамилии не упоминаются. А жаль! страна должна знать своих героев в лицо).

Фото со спутника Mars Recoinassance Orbiter
Кусочек выводов комиссии о непосредственных причинах аварии я позволю себе перевести дословно.
Всем коллегам рекомендуется распечатать и повесить рядом с монитором.
"Рекомендация 5:
- Как правильно тормозить двигателем?
- Сначала нужно тормозить бампером, затем радиатором и только после этого - двигателем.
(с) анекдот
На днях выложен официальный отчет о причинах жесткой посадки спускаемого аппарата "Скиапарелли" Европейского космического агентства на Марс.
Подобные отчеты хороши тем, что доступны публично - и дают редкую возможность заглянуть в поведение и причины отказов сложных систем автоматики.
И в большинстве случаев убедиться, из-за какой же ерунды оно не работает.
Фото отсюда. Все фото крупно по клику
Нельзя не отметить, что мягко приземлиться на Марсе (да и хотя бы просто долететь до Марса) - задача, мягко говоря, нетривиальная.
Исторически - примерно половина миссий вообще в район Марса не добралась.

инфографика отсюда
Итак, 16 октября 2016 года в 14:42:22 UTC спускаемый аппарат "Скиапарелли" (дальше - СА) вошел в марсианскую атмосферу.
Что было дальше - проще понять на картинке из вышеозначенного отчета.
Собственно, так оно все и сработало. За маленьким исключением:
Верхняя крышка вместе с парашютом отделилась намного раньше, чем нужно. А реактивный двигатель мягкой посадки был выключен через 3 секунды вместо расчетных 30. В результате "Скиапарелли" врубился в поверхность Марса на скорости примерно 150 метров в секунду.
Причины бОльшей части проваленных миссий к Марсу точно не установлены и поныне. Но в данном случае телеметрия со спускаемого аппарата была прямо в процессе спуска передана на спутник Trace Gas Orbiter - и оттуда в центр управления, что позволило произвести "разбор полетов".
Чтобы сложная цепочка событий выполнилась как нужно - СА должен знать, где он находится и далеко ли еще до земли (то бишь, до Марса).
Для этого на борту имеются инерциальная навигационная система (ИНС, суть гироскопы+акселерометры) и радарный высотомер.
ИНС рассчитана на определенный предел угловых скоростей. Если предел превышен - выдается сигнал "зашкал", данные соответственно недостоверны.
Чтобы нужный предел определить - провели некие расчеты по некой модели сверхзвукового парашюта и взяли предельный получившийся случай. На деле поведение парашюта оказалось несколько отличным от расчетного, а про неравномерное выгорание теплоизоляции вовсе забыли.
В результате ИНС первый раз ушла в "зашкал" еще при вводе парашюта. Проще говоря, СА как следует помотался на стропах, но затем стабилизировался.
Через небольшое время СА начал вращаться вокруг своей оси со скоростью, снова загнавшей ИНС в "зашкал".
Неправильно подобранные пределы измерения ИНС - это первая, но не последняя ошибка.
Когда при расследовании обратились к Jet Propulsion Laboratory - единственной в мире на сегодня конторе, умеющей сажать что-либо на Марс (и то не всегда) - ответ был прост и немного предсказуем:
"А чего вы хотели? Сверхзвуковой парашют в атмосфере Марса - штука плохо предсказуемая и на Земле толком не тестируемая, фиг смоделируешь. Посему рассчитывайте на все, что угодно, причем с запасом. Вон, у нас при посадке Opportunity та же фигня с закруткой была - и ничего, тринадцатый год по Марсу катается".
Надо было до старта спецов спрашивать, а не при разборе полетов, однако.
Кстати, мало кто знает, что обычный спускаемый на Землю аппарат корабля "Союз" при спуске так же закручивается со скоростью до 12 оборотов в минуту - и это считается штатным.
"Если предел превышен - выдается сигнал "зашкал", данные соответственно недостоверны"
Логика правильная, но вот уставка этого предела - оказалась неправильной. В результате некоторое время ИНС выдавала неправильные данные, не ставя флага переполнения.
В теории должно быть 15 мс. По факту все в эту цифру верили, но никто никогда не проверял.
(а будь там реально 15мс - при все при остальном посадка, вероятно, была бы мягкой).
Эти неправильные данные угловой скорости были успешно проинтегрированы бортовым компьютером при расчете угловых координат СА.
Результат интегрирования оказался настолько неправильным, что СА якобы "перевернут кверх ногами".
К сожалению, никому в голову не пришло подумать: а каким образом вообще аппарат, подвешенный под парашютом, может перевернуться кверх ногами и так лететь?
При дальнейшем расчете высоты (через угловые координаты = вектор направления движения и скорость) - рассчитанная высота оказалась отрицательной (косинус угла >90град отрицательный). То бишь - СА летит "где-то внутри Марса."
Никого из программистов не смутил ни сам факт отрицательной высоты летящего СА, ни мгновенное ее изменение на несколько километров.
Но не стОит считать программистов миссии "Экзомарс" совсем тупыми. Разумеется, там предусмотрена проверка: если ИНС выдает сигнал "зашкал" 5 секунд и дольше - он считается неисправным и управление передается радиовысотомеру (работавшему штатно).
Все замечательно. Но есть нюанс! Там не просто радиовысотомер, а допплеровский. Что означает: высотомер выдает не абсолютное значение высоты, а ее изменение.
Соответственно, чтобы работать по высотомеру - нужно знать "точку отсчета".
В качестве которой было взято... правильно, вышеупомянутое отрицательное значение высоты. Полученное о неисправной ИНС.
Которое теперь еще и уходило дальше "в минус" по мере реального снижения над Марсом!
Логика управления парашютом, получив информацию "СА находится под поверхностью Марса" - решила "парашют под землей не нужен" и отстрелила его нафих. И включила посадочный двигатель. (он, судя по логике, и под землей нужен).
Расчет времени отключения посадочного двигателя - это отдельный алгоритм. Выключение происходит, когда и кинетическая энергия летящего СА, и потенциальная энергия его в гравитационном поле Марса - равны нулю. Что есть совершенно корректное терминальное условие мягкой посадки.
Как его проверить? Сложили оба значения и проверили сумму на ноль.
Кинетическая энергия была посчитана правильно и была положительной. А вот потенциальная "под поверхностью Марса" оказалась настолько отрицательной, что условие отключения двигателя было выполнено еще до того, как он включился. В результате двигатель отключился так быстро, как только мог - через 3 секунды.
Отделение парашюта и отключение двигателя произошли в нескольких километрах над поверхностью Марса и на сверхзвуковой скорости.
Через несколько секунд высота СА - реально стала отрицательной!
Потому что от "торможения о поверхность" (lithobraking, ага) образовался кратер диаметром 2,4м и глубиной 0,5м.
Который нужно заслуженно назвать в честь главного программиста проекта.
(В отчете фамилии не упоминаются. А жаль! страна должна знать своих героев в лицо).
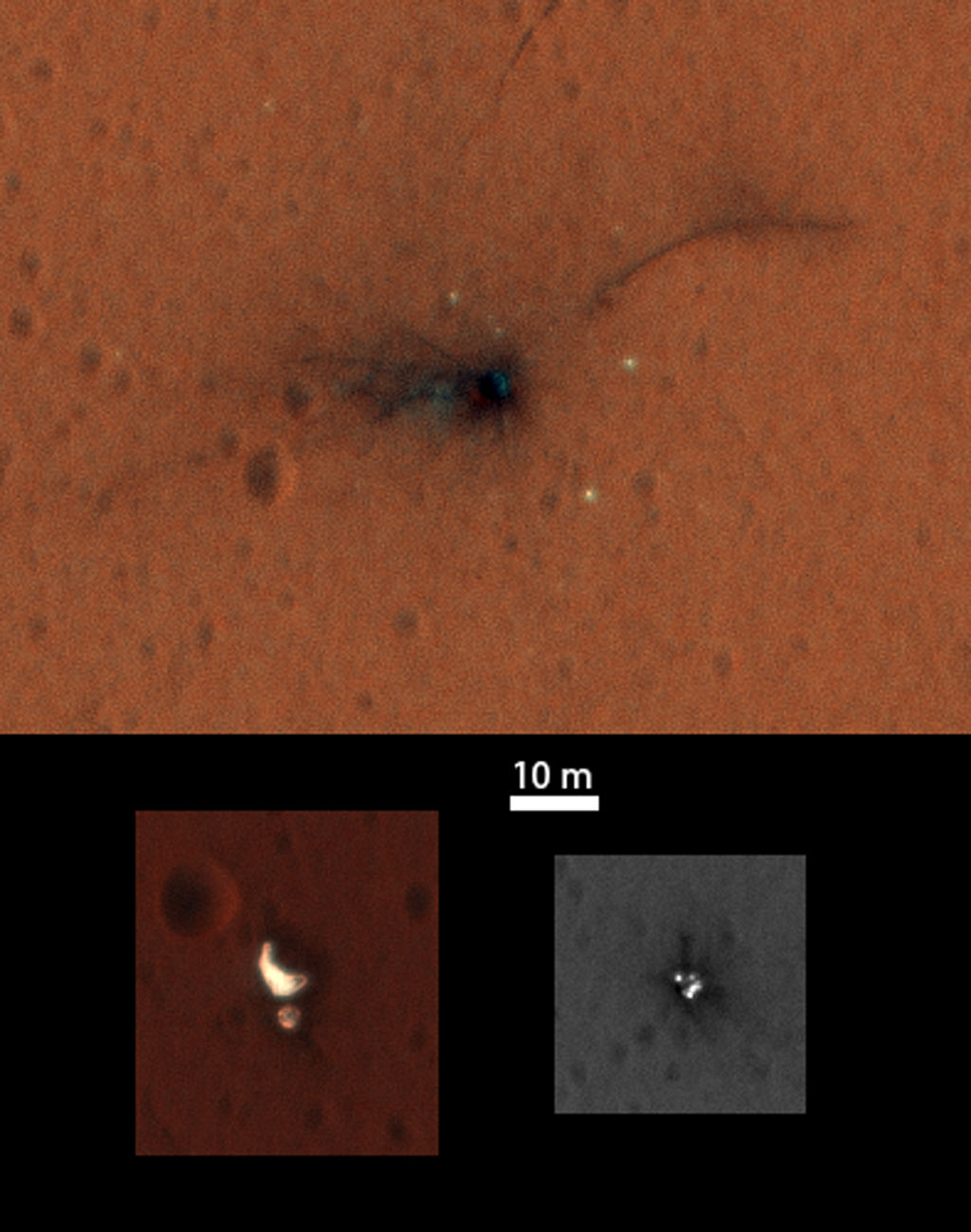
Фото со спутника Mars Recoinassance Orbiter
Кусочек выводов комиссии о непосредственных причинах аварии я позволю себе перевести дословно.
Всем коллегам рекомендуется распечатать и повесить рядом с монитором.
"Рекомендация 5:
Бортовое программное обеспечение должно содержать адекватные и достоверные проверки разумности всех входных данных и результатов расчетов.
Включая, но не ограничиваясь:
Проверка ориентации (не может быть кверх ногами под парашютом)
Проверка высоты (не может быть отрицательной)
Проверка ускорения падения (не может превышать ускорения свободного падения)
Проверка производной высоты (не может уходить в минус от 3,7км за 1 секунду)
Сравнение актуального профиля высоты и ускорения с расчетным, чтобы заранее понять недостоверность измерений.
А я бы добавил от себя к отчету еще одну рекомендацию:
Установить высотомер, который выдает абсолютное значение высоты. А не производную.
P.S. Следующий раздел отчета заставил меня криво улыбнуться.
После двух неудачных попыток мягкой посадки на Марс (первой был Бигль-2) Европейское космическое агентство сделало жест "лапки кверху", отказалось от дальнейших разработок СА... и подрядило для создания СА для своего марсохода - российское НПО им.Лавочкина. Которое тоже на сей день не добилось ни одной успешной посадки на Марс Но за европейские деньги попытаться еще разок - да пожалуйста.
Так вот, раздел 8 я бы назвал так:
Рекомендации от одной конторы, не умеющей мягкую посадку на Марс - другой конторе, не умеющей мягкую посадку на Марс: "Как надо делать мягкую посадку на Марс".
Сдается мне, что году так в 2021, а то и в 2023 - будем примерно так же разбирать официальный доклад "О причинах появления очередного российско-европейского рукотворного кратера на Марсе", ага.Включая, но не ограничиваясь:
Проверка ориентации (не может быть кверх ногами под парашютом)
Проверка высоты (не может быть отрицательной)
Проверка ускорения падения (не может превышать ускорения свободного падения)
Проверка производной высоты (не может уходить в минус от 3,7км за 1 секунду)
Сравнение актуального профиля высоты и ускорения с расчетным, чтобы заранее понять недостоверность измерений.
А я бы добавил от себя к отчету еще одну рекомендацию:
Установить высотомер, который выдает абсолютное значение высоты. А не производную.
P.S. Следующий раздел отчета заставил меня криво улыбнуться.
После двух неудачных попыток мягкой посадки на Марс (первой был Бигль-2) Европейское космическое агентство сделало жест "лапки кверху", отказалось от дальнейших разработок СА... и подрядило для создания СА для своего марсохода - российское НПО им.Лавочкина. Которое тоже на сей день не добилось ни одной успешной посадки на Марс Но за европейские деньги попытаться еще разок - да пожалуйста.
Так вот, раздел 8 я бы назвал так:
Рекомендации от одной конторы, не умеющей мягкую посадку на Марс - другой конторе, не умеющей мягкую посадку на Марс: "Как надо делать мягкую посадку на Марс".
no subject
Date: 2017-05-26 03:12 am (UTC)В инженерном аспекте в том столько печали, что можно выбрать любую часть и на том закончить. Допплеровский радар не требует никакой точки отсчёта, а даёт прямое измерение абсолютной скорости относительно отражателя, выраженное в разнице между частотой излучённого и принятого сигнала. Одного этого сигнала достаточно чтобы определить абсолютную скорость машины относительно поверхности с достаточной точностью. Кроме того, только особо неправильная религия может запретить авторам того же радара измерять дальность до отражателя в обычном для радаров импульсном режиме. В результате один сенсор дал бы две величины: дальность до поверхности и скорость относительно неё. На этом можно было бы и закончить диагноз, но уходящие в насыщение гироскопы также заслуживают внимания. Есть некая скорость вращения, при которой машина разлетится на куски -- она не столь велика, чтобы не быть вписанной в спецификацию, и тем принципиально исключить ситуацию "насыщения гироскопа". Это показывает что с гироскопом также потрудились недоумки. Программные ограничения на величины физических измерений -- нормальная практика для ответственных задач, настолько нормальная, что нормальный для таких задач язык программирования Ада, или язык описания схем VHDL, содержат эти ограничения в базовом синтаксисе. Поэтому можно предположить что недоумки притащили с собой си-плюс-плюс или ещё что похуже, и по привычке накропали говнокода, который либо не проходил формальную инспекцию, либо проводили её такие же недоумки.
"Пгавильной догогой идёте, товагищи! Только не в ту сторону." (с)
з.ы. Всё бы не беда, поскольку мопед не наш, но Роскосмос собрался учиться посадке на Луну у ESA. Вот это таки беда, и надеюсь найдётся кто-то в Роскосмосе, чтобы заметить эту беду прежде чем записанная в ФКП жалкая имитация лунной программы разобьётся из-за недоумков-инструкторов, у которых (и это не шутка) теперь есть "опыт".
no subject
Date: 2017-05-26 03:38 am (UTC)no subject
Date: 2017-05-26 04:58 am (UTC)Вот именно! Скорости! А нужна-то от него высота!
Для расчета высоты по скорости нужно взять первообразную.
А теперь вспомним базовые понятия матана.
Любая функция, полученная из первообразной добавлением константы - тоже будет первообразной.
Вот посему и нужна "реперная точка".
"особо неправильная религия может запретить авторам того же радара измерять дальность до отражателя в обычном для радаров импульсном режиме"
Вот-вот.
Кстати, как раз радар в 2020 - будет точно такой же!
"она не столь велика, чтобы не быть вписанной в спецификацию"
Так вписали! Но не ту, какую надо с запасом. "маловато будет"
"который либо не проходил формальную инспекцию, либо проводили её такие же недоумки."
Полагаю, формальную инспекцию кода делали тоже программисты.
Все считается замечательно! А какой физический смысл у переменной H_above_Mars... да какая разница!
"Роскосмос собрался учиться посадке на Луну у ESA"
Что???? ESA вообще никогда ничего не сажало на Луну и даже не собирается
(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 10:10 am (UTC)вы явно никогда не работали в 3-D программах: их вычислительный модуль видит только поверхность тела, а не само тело, т.е. с какой стороны смотрит радар на поверхность изнутри марса или снаружи, для программы нет никакого значения.
Тут как раз все складывается одно к одному:
- аппарат двигается в сторону поверхности
- он (по данным расчета) перевернут = двигается изнутри Марса к его поверхности
(no subject)
From:(no subject)
From:no subject
Date: 2017-05-28 04:39 pm (UTC)На самом деле проблема глубже.
Эти ограничения хороши для проектирования, но падающему на поверхность аппарату абсолютно без разницы, примет он выданную прибором отрицательную высоту как истинную или отвергнет показания.
Ибо он при обоих вариантах всё равно разобьётся - от незнания правильной высоты.
(no subject)
From:no subject
Date: 2017-05-26 03:30 am (UTC)no subject
Date: 2017-05-26 04:17 am (UTC)Мудрые люди, писавшие ПУБЭ, предписали подземный топливопровод к прочному баку на расстоянии минимум 20 метров либо за капитальным строением, и металлический теплообменник с выкладкой из кирпича, по совместительству неплохо держащий мелкие осколки и ударную волну. Жертв не было.
(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-28 04:48 pm (UTC)Даже самолёты то при перелёте экватора глючат, то линии перемены дат, а уж при полёте ниже уровня моря вообще атас.
no subject
Date: 2017-05-26 04:34 am (UTC)Результат виден. Лажа на лаже и лажей погоняет. Там, где технолога жестко вздрючит главный технолог, потому что опыт реального мира штука жестокая, программиста тимлид ласково чмокнет в щечку и назовет пусей. А это не приучает к ответственности.
no subject
Date: 2017-05-26 07:20 am (UTC)Кусок диалога с самодовольным мальчиком-программистом из той конторы многое проясняет:
Я - Написание программы же начинается с постановки задачи "что программа должна делать" и "что получится в итоге".
Он - Да ты ничего не понимаешь в программировании. Написание программы начинается с построения модели базы данных.
Тут то я и понял, что выросло новое поколение особо одаренных... Кстати, зарплата у него была существенно выше моей...
(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 04:48 am (UTC)Положим, как убедились еще в прошлом веке разработчики парашютных платформ для десантирования техники, груз под парашютом может испытывать самые разнообразные нагрузки и менять ориентацию весьма непредсказуемо, в том числе и выходить на переворот. Очевидное - не всегда правильное :)
no subject
Date: 2017-05-26 05:06 am (UTC)Но вот неподвижно лететь так некое продолжительное время...
(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 06:30 am (UTC)2) Проектировщики совершенно зря "завязали" всю систему посадки на единственный гироскопический датчик вертикали, причем логика посадки требовала, чтобы этот дачик работал АБСОЛЮТНО идеально.
3) Обалдеть, фантастика какая-то, до какой степени вы неправильно поняли отчет и сколько отсебятины понапридумывали!!!
- Проблему вызвали колебания по тангажу, а не вращение вокруг вертикальной оси.
- Датчик именно что выдал информацию о "зашкаливании", что привело к неправильному вычислению вертикали. (Угол получался численным интегрированием угловой скорости).
- Re: "При дальнейшем расчете высоты (через угловые координаты = вектор направления движения и скорость) "
Нихрена. Высота рассчитывалась как "расстояние по радару * косинус угла между вертикалью и направлением антенны". Направление антенны было оценено неправильно.
- Re: "Разумеется, там предусмотрена проверка: если ИНС выдает сигнал "зашкал" 5 секунд"
Там было другое. Если сигнал " по высотомеру" очень странный (предположительно ошибочный), то ждать 5 секунд (надеясь на улучшение) , а потом все равно передавать управление на этот глючный сигнал. Потому как посадка иным спосбом в этой схеме АБСОЛЮТНО невозможна.
- Re: "Там не просто радиовысотомер, а допплеровский. Что означает: высотомер выдает не абсолютное значение высоты, а ее изменение. Что означает: высотомер выдает не абсолютное значение высоты, а ее изменение. Соответственно, чтобы работать по высотомеру - нужно знать "точку отсчета". В качестве которой было взято... правильно, вышеупомянутое отрицательное значение высоты"
Ну у Вас и фантазия!!! Это ж надо такое придумать :-)))
- Re: "Выключение происходит, когда ... равны нулю"
Нет. Когда полная энергия (кинетическая + потенциальная) меньше некой пороговой величины.
no subject
Date: 2017-05-26 07:30 am (UTC)Тупой таймер с программой отработал бы лучше всей этой "типа системы" .
(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 07:33 am (UTC)(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 07:12 pm (UTC)2) Тут можно спорить, потому как в отчете упомянуто "spin axis" что есть вообще ось гироскопа.
А какая ось аппарата - неизвестно.
А поскольку доступа к исходниками телеметрии у нас нет - спорить бесполезно
MERы при спуске закручивались именно вдоль оси симметрии
3) " все равно передавать управление на этот глючный сигнал."
А куда деваться-то? Чтобы получить высоту взятием первообразной от скорости снижения - нужна базовый отсчет, а ее в такой схеме управления может выдать только ИНС
4) "Ну у Вас и фантазия!!! Это ж надо такое придумать :-)))"
Это не фантазия.
Допллер-радар меряет разность частот отправленных и принятых сигналов, пропорциональную скорости изменения расстояния до объекта. Он НЕ меряет задержку между отправленным и принятым сигналами (и вообще может излучать сигнал непрерывно), а посему мерить напрямую расстояние до объекта он не может в принципе.
Для получения высоты нужно взять первообразную, а для того - иметь базовую точку.
Почему поставили именно такой радар - это уже вопрос не ко мне
"Когда полная энергия (кинетическая + потенциальная) меньше некой пороговой величины."
Да, Вы правы. Я упростил - и напрасно.
Нужно всегда и везде упоминать "числа с плавающей точкой нельзя сравнивать с нулем"
(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 06:50 am (UTC)xxxxxxxx(роскомнадзор) :) Напридумывают вплоть до квантовых флуктуаций что может случиться :)))no subject
Date: 2017-05-26 06:02 pm (UTC)(no subject)
From:no subject
Date: 2017-05-26 07:23 am (UTC)Аналогия: черные ящики. Не всегда находятся, не всегда расшифровываются.
no subject
Date: 2017-05-26 02:53 pm (UTC)no subject
Date: 2017-05-26 07:27 am (UTC)no subject
Date: 2017-05-26 09:29 pm (UTC)(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 08:55 am (UTC)Экзомарс стал Эндомарсом, а кратеров Скиапарелли теперь два!
no subject
Date: 2017-05-26 09:47 am (UTC)Тут очевидная проблема в отсутствии бэта тестера ПО: они должны были написать какую-то программу, которая выставляла-бы случайные значения на показания всех датчиков включая сбои, ошибки выходы из строя блоков... И с помощью нее найти слабые места... или если эта программа была - то в нее были внесены сильные ограничения ширины теста.
no subject
Date: 2017-05-26 11:08 am (UTC)Во-вторых, программа бы тест прошла, т.к. по спецификации аппарат не может крутиться быстрее некой величины, пришло большое значение => датчик (временно?) глючит, игнорируем данные (используем последнее "правильное" значение). И, кто бы её ни писал, ленивый студент или мудрый автор коммента в стиле "ололо погромисты идиоты", корректной ориентации в пространстве она бы уже не знала.
Хорошая идея была выше в комментах -- брать предельное значение, которое аппарат физически может пережить.
(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:(no subject)
From:no subject
Date: 2017-05-26 04:54 pm (UTC)no subject
Date: 2017-05-26 07:38 pm (UTC)В отчете есть ссылка на статью про марсианские парашюты от JPL (вот они-то по этой части эксперты)
(no subject)
From:no subject
Date: 2017-05-29 10:26 am (UTC)Судя по инфографике выходит, что США единственные кто сел на МАРС и известно это с ИХ слов?
А кто проверит-то?
no subject
Date: 2017-05-29 08:02 pm (UTC)Вон, тут товарищ собирался (https://boomstarter.ru/projects/zelenyikot/proekt_sputnika_dlya_fotosemki_luny) запустить спутник на орбиту Луны и посмотреть, были ли там американцы
(no subject)
From: